Trajectory Planning for Automated Driving using Target Funnels
European Control Conference (ECC) 2025
Novel trajectory planning method to reduce effect of uncertain and noisy estimates of the upcoming road course.

I am a PhD candidate at Prof. Schoellig’s lab at the Technical University of Munich. My main interests include control for complex systems, semantic reasoning, and robotics. Previously, I completed a M.Sc. degree in Electrical Engineering at TUM. I was at BMW, where I wrote my master’s thesis with Prof. Nenchev, and Rohde & Schwarz.
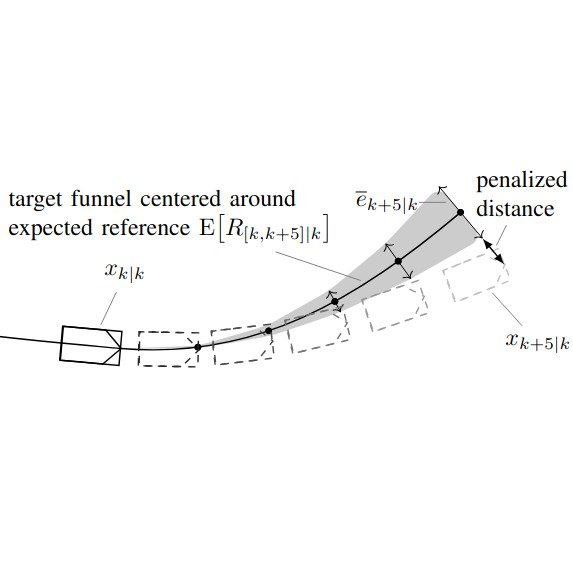
Novel trajectory planning method to reduce effect of uncertain and noisy estimates of the upcoming road course.